In the kinematic chain of the manipulator of hydraulic excavators, the drive of the revolute pairs is carried out by a hydraulic cylinder hinged to the two links of the pair, which realizes a planar drive mechanism of the type Inverted Slider-Crank Mechanism, centric type (ISCM). The power capabilities of the ISCM are described by the basic mechanism transfer function dS/dφ, which fully describes the driving moment of the ISCM in dimensionless form. The present work addresses the task of synthesizing the mechanisms with hydraulic cylinders (ISCMhc), of a two-link planar manipulator for lifting a load of weight G at different points of the workspace. The motion is assumed to be at low speed and no dynamic loading is considered. A solution to the problem is given for each mechanism ISCMhc separately, passing through several stages: preliminary selection of the small parameter λ of the ISCM, determination of the external load of the cylinders and its normalization to the power capabilities of the ISCM in a dimensionless form, determination of the required force of the hydraulic cylinders, determination of the angles and dimensions of ISCM and cylinder stroke check. Finally, an example with specific input data is given. The proposed methodology for the synthesis of ISCMhc appropriately takes into account the power specifics of the considered mechanism, as the known external load fits into the main transfer function of the mechanism dS/dφ, without exceeding it, thus guaranteeing the performance of the task for the entire working range of the manipulator.
The Inverted Slider-Crank Mechanism (ISCM) driven by hydraulic cylinder (ISCMhc) is a powerful tool for the driving of revolute pairs of the plain manipulators. These mechanisms are characterized by great power capabilities, simple structure, high reliability and are widely used in the practice. They are included in the kinematic schemes of automatic devices 1, industrial robots 2, 3, construction machines, loaders, hydraulic excavators [4-7] 4, etc. Usually one to three such mechanisms are included in the mentioned kinematic chains of excavators 8, 9. Thus, in order to study these complex kinematic chains, the properties of the constituent mechanism must be well known. In 10 the transfer functions of ISCM are well described and the power characteristics are connected with the transfer functions.
The tasks for synthesis of single ISCM typically involve three to five parameters to determine – cylinder force, dimensions, and angles. In 11, the synthesis problem is solved using infinitely close positions with three transfer functions and gives the exact solution. Optimization tasks are also most often solved with consideration of external forces. In 12, a two-criteria optimization problem is solved with a constant external moment and considering the inertial load. Another paper 13 reports the optimization synthesis of a hydraulically actuated drive mechanism of excavators. In 14 the optimal synthesis of manipulator drive mechanisms of multibody chain based on tribological criterion, is carried out. The study 15 offers a method for synthesis of the drive mechanism of hydraulic excavators with hydraulic cylinder, type ISCMhc, considering the specific forces characteristics of the ISCM.
The question of the synthesis and optimization of hydraulic excavators with two or three ISCM driven hydraulically, is very important for the practice, because of variety of excavators and working conditions. In 16 a manipulator with two ISCM is investigated with a goal to optimize the adaptive control of movement of hydraulic cylinders. The paper 17 presents an optimal design of the front linkage of an excavator using a multi-objective function to increase the excavator's workspace, working velocity, excavating force, and load capacity simultaneously. Other study 18 presents method of optimization of hydraulic excavator using digging capability polygon and a genetic algorithm to solve the established optimization problem. The study 19 presents a novel, hybrid group multi-criteria decision approach that can be used to evaluate alternatives for the optimal synthesis of loader drive mechanisms. The paper 20 describes a general mathematical model of hydraulic excavators for determining the boundary and possible digging forces and equivalent loads of the drive mechanism throughout the excavator’s working area.
The present work aims to consider the synthesis of the ISCMhc actuators of a hydraulic loading manipulator, in the structure of which there are two ISCM mechanisms driven by a hydraulic cylinder, taking into account the specific force characteristics of the ISCM.
We consider the task of synthesis of drive mechanisms with hydraulic cylinders - type ISCMhc, of a two-link planar manipulator for lifting loads in the following setting: The purpose of the manipulator is to raise and lower a load of weight G at different points of the working space (plain Ω) defined by the lengths and by the rotation angles of the two links. The motion is assumed to be at low speed and no dynamic loading is considered.
The task is to synthesize the two drive mechanisms with hydraulic cylinders - О1А1В1 and О2А2В2, to choose the cylinders, i.e. to determine the maximum required force and required stroke. And to determine the location of the attachment points of the cylinders (A and B) relative to the given links.
The following parameters nomenclature is used, which for the mentioned two mechanisms О1А1В1 and О2А2В2 should bear index 1 or 2, respectively (see figure 1):
L=OA, R=OB - lengths of the links of the rotation pair OAB such that R<L;
λ – a small parameter characteristic of ISCM, defined as:
 | (1) |
ψ – the angle defining the position of the two heavy links, the first being measured from the Оx axis, and the second – from the first link;
φ – the ISCM angle (of the rotation couple AOB);
S = AB - the variable distance between the joints A and B of the cylinder (stroke of the cylinder);
f(φ)=dS/dφ – basic transfer function of ISCM;
F – the force of the hydraulic cylinder;
h(φ) – the arm of the force F relative to the point O;
MF(φ) – driving moment of the force of the cylinder relative to the point O;
T(ψ) – external moment of gravity forces, relative to the point O;
α – angle determining the position of the unit OA;
β – angle determining the position of the unit OB;
γ – total angle that determines the relationship between the angles ψ and φ:
 | (2) |
where the total angle γ is essential for the calculations, and its distribution as α and β is determined by the final design layout of the mechanism.
The movement of the manipulator and the position of the end point H is defined by the lengths of the two given links and by the range of movement of the links, i.e.:
l – the length of the manipulator given links:
ψa and ψb – set the rotation range of each of the links;
φa and φb – set a range of motion of the two ISCMs where it is obvious:
 | (3) |

The problem of the synthesis of a single ISCMhc-type mechanism under arbitrary external loading was solved in 11, 15.
The task of this work is to synthesize the ISCMhc-type mechanisms of a two-link planar manipulator that manipulates a load G in the working area (plain Ω) determined by the angles ψ1 and ψ2 of the two given links, for the entire working range ∆ψ1 and ∆ψ2. The following parameters are considered to be set here:
G, G1, G2, l1, l2, ∆ψ1, ∆ψ2, ψ1a, ψ2a.
And 5 parameters are subject to determination:
λ, F, γ, φa, R, for each of the ISCMhc mechanisms. Again, for convenience, we will drop the indices 1, resp. 2 of both mechanisms.
The moments of the external forces T(ψ1,ψ2) in this case depend on the weight of the load G, the link weights G1 and G2 and the link lengths, and can be determined over the entire operating range ∆ψ1 and ∆ψ2.
The driving moment of the force of the cylinder F relative to point O is defined for the entire working range of the angle φ (0-180o) in the form 10:
 | (4) |
Dividing (4) by F.R, the driving moment of the cylinder can be done in the next dimensionless form:
 | (5) |
where f(φ) is the known dimensionless transmission function dS/dφ of the ISCM, which fully describes the power capabilities of the mechanism 10.
It is obvious that the moment of the force of the cylinder relative to the point O must be greater than or equal to the external/technological moment for the entire considered range ∆ψ1 and ∆ψ2 for both mechanisms:
 | (6) |
At the beginning of the synthesis task, the characteristic ISCM small parameter λ is chosen. Usually, the small parameter λ varies between 0,2 and 0,5. A smaller parameter λ results in a more compact mechanism but with a smaller driving moment MF(φ), and a larger parameter λ leads to larger dimensions and a larger driving moment MF(φ). Of course, after varying the values of the small parameter λ, several solutions can be obtained and the optimal solution can be sought.
3.2. The Load on the Hydraulic CylindersThe external forces that act on the system are only the forces of gravity - of the load G and the weights of the two links - G1 and G2. Looking at the equilibrium of the two links of the system, we can determine the moment of the gravity forces relative to the points O1, resp. O2:
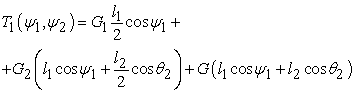 |
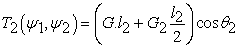 | (7) |
 |
For the entire operating range (∆ψ1, ∆ψ2), the cylinder force moment MF(φ) must be greater than or equal to the external technological moment T(ψ). I.e. condition (6) must be met. We divide the equation (6) by F.R and reduce it to a dimensionless form:
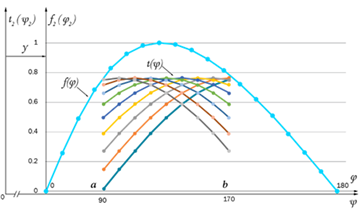
I.e. the external dimensionless moment function t(ψ) must fit to the function f(φ) without exceeding it, for the entire range (∆ψ1, ∆ψ2).
This is achieved by normalizing the moment T(ψ), by dividing it by the coefficient K=F.R and phase shift of the angle γ along the horizontal axis of the two functions - f(φ) versus t(ψ), until reaching the maximum touching of the two curves t(ψ) and f(φ), when condition (8) is fulfilled.
So after this normalizing we get the coefficient K=F.R and the angle γ. This process will be explained later with one example.
3.4. Determination of the Cylinder Force and ISCM DimensionsThe cylinder force F and the ISCM dimension R are defined as the product:
 | (9) |
A standard cylinder with force Fo is chosen. Then for the sizes of the AO and OB units we get:
 | (10) |
Several choices of a standard cylinder with force Fo may be imposed until appropriate dimensions of the mechanism - R and L are obtained. It should be borne in mind that for a fixed parameter λ, as in the case, the choice of a cylinder with a larger force leads to smaller dimensions of the mechanism, and the choice of a cylinder with a smaller force leads to larger dimensions of the mechanism.
Next is a check to perform the stroke of the cylinder. It is checked whether the selected cylinder has the required stroke 11:
 | (11) |
After the determination of the angle γ from point 3.3. follows the determination of the boundary angles of the ISCM acc. to (2):
 | (12) |
To finally define the geometry of the considered mechanism, it is necessary to determine the structural angles α and β, which determine the angular fixation of the mechanism relative to the point O. One angle is chosen for structural reasons, and the other is determined by the known relation (2).
This completes the task of synthesizing the two ISCMhc mechanisms.
With this example, we will illustrate the synthesis according to the presented methodology of a two-link manipulator with the following input data:
G = 20000 N;
G1 = 2000 N, G2 = 1500 N;
l1 = l2 = 2 m;
ψ1a = 0°, ψ1b = 90°, ∆ψ1 = 90°;
ψ2a = 90°, ψ2b = 170°, ∆ψ2 = 80°.
We will follow the methodology set out in point 3.
4.1. Preliminary Choice of the Parameter λWe choose a value for the parameter λ that is the same for both mechanisms:
λ 1 = λ2 = 0,33
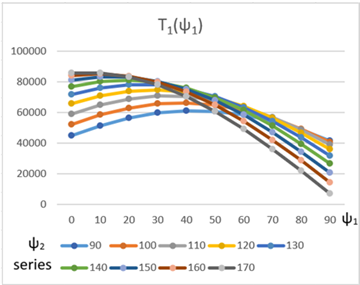
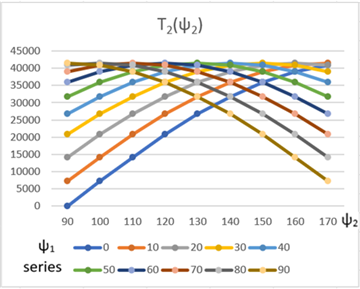
With the help of formulas (7), the moment of the gravity forces, as an external load on the hydraulic cylinders of the ISCMhc mechanisms, was determined. Actually the moment of the gravity forces is function of both angles - ψ1 and ψ2. Here we present them to one angle function by fixing the other angle.
Figure 2 and figure 3 show the graphs of the moment of gravity forces for the two mechanisms, as a family of curves - function of the two angles of the manipulator - ψ1 and ψ2, obtained by varying one angle while keeping the other angle fixed.
4.3. Normalizing of the External Moment T(ψ) to the Moment of the Cylinder Force MF(φ)You know that dividing equation (6) by the coefficient K=F.R we reduce it to the familiar dimensionless form (8). Then we vary the coefficient K=F.R and the angle γ until we achieve a perfect fit of the family of curves t(ψ) to the function f(φ) so that the family of curves of the external dimensionless moment t(ψ) fits the function f(φ) without exceeding it, for the entire working range (∆ψ1, ∆ψ2) – see figure 4 and figure 5.
Thus, for both mechanisms, we obtain the following solution: К1= 90000 Nm, γ1= -54,22°
К2= 54180 Nm, γ2= 54,65°

If we choose for example next values of the hydraulic cylinders’ forces: F10= 200000 N and F20=150000 N, we receive next dimensions of the ISCM links acc. to (10):
R1=0,45 m, L1=1,36 m, R2=0,36 m, L2=1,095 m.
Using formula (12) we get for the boundary angles of ISCM:
φ 1a = 54,22°, φ1b = 144,22°, ∆φ1 = 90°;
φ 2a = 35,35°, φ2b = 115,35°, ∆φ2 = 80°.
Finally, a check of the cylinder’s stroke, acc. to (11), shows next data:
S1=0,588 m, S2=0,465 m.
The proposed methodology for synthesis of ISCMhc appropriately takes into account the power specifics of the considered mechanism, as the known external load in a dimensionless form fits into the main transfer function of the mechanism dS/dφ, without exceeding it, which guarantees the performance of the task for the entire working range of the manipulator. It is characteristic of the method that the task of synthesizing the drive mechanisms ISCMhc of the manipulator under a certain external load can be separated into two independent synthesis tasks as in the case. This methodology can be applied to any manipulator or excavator as long as the external loading is set for the entire working range. The methodology has a universal character and allows analyzing and optimizing any existing manipulator with ISCMhc type actuators.
| [1] | Myszka D., Machines and mechanisms: applied kinematic analysis-4th ed. Pearson Education, Inc., publishing as Prentice Hall, 2012. | ||
| In article | |||
| [2] | Bu F. and Yao B., “Nonlinear model based coordinated adaptive robust control of electro-hydraulic robotic arms via overparametrizing method”. February 2001, in - IEEE International Conference on Robotics and Automation 4: Proceedings, 3459-3464, vol. 4. | ||
| In article | |||
| [3] | Valdiero A., Guenther R., De Pieri E. and Negri V. (2013). “Cascade Control of Hydraulically Driven Manipulators With Friction Compensation”. International Journal of Fluid Power, March 2007, 8(1): 7-16. | ||
| In article | View Article | ||
| [4] | Hao W., “Analysis report of 2010 excavator market in China,” Construction Machinery Technology & Management, vol. 2, article 23, 2011. | ||
| In article | |||
| [5] | Ni T., Zhang H, Yu C., Zhao D. and Liu S., “Design of highly realistic virtual environment for excavator simulator”. Computers and Electrical Engineering, vol. 39, no. 7, pp. 2112-2123, 2013. | ||
| In article | View Article | ||
| [6] | Xu J. and Yoon H-S., “A Review on Mechanical and Hydraulic System Modeling of Excavator Manipulator System”. Journal of Construction Engineering. Volume 2016, Article ID 9409370. | ||
| In article | View Article | ||
| [7] | Gnasa U., Thielecke K., Modler K-H. and Richter E-R., “Design and development of a hydraulic manipulator with mechanism/Pro”. International ADAMS users’ Conference, Berlin, 17-18 Nov 1999. | ||
| In article | |||
| [8] | Mitrev R., “Web Based Enviroment for Design and Analysis of Hydraulic Escavator”. Journal of Multidisciplinary Engineering Science and Technology (JMEST), Vol. 2, Issue 12, December 2015. | ||
| In article | |||
| [9] | Patel D., Patel B. and Patel M., “A Critical Review on Kinematics of Hydraulic Excavator Backhoe Attachment”. Int. J. Mech. Eng. & Rob. Res. Vol. 4, No. 2, April 2015. | ||
| In article | |||
| [10] | Ganchev K., “Inverted Slider-Crank Mechanism Driven by Hydraulic Cylinder: Transfer Functions and Approximations”, Engineering Mathematics. Volume 6, Issue 1, June 2022, pp. 1-5. | ||
| In article | |||
| [11] | Ganchev K., “Synthesis of Slider-Crank Mechanism Driven by Hydraulic Cylinder”. Mechanika na Mashinite, 34/2001, pp. 75-95. | ||
| In article | |||
| [12] | Koev P. and Vitliemov V., “Тwo-Criterion Optimization Kinematic Synthesis of Slider-Crank Mechanism”. Mechanika na Mashinite, vol.5 (20), 4/1997, pp. 30-34. | ||
| In article | |||
| [13] | Mitrev R. and Todorov T., “Multicriteria Optimal Selection of a Hydraulic Cylinder for Drive Mechanisms”. FME Transactions, 49/2021, 501-510. | ||
| In article | View Article | ||
| [14] | Pavlovic J., Janosevic D. and Jovanovic V., “Optimization of manipulator drive mechanisms of hydraulic excavators on the basis of the tribological criterion”. Scientia Iranica, B (2020), 27(5), 2372-2381. | ||
| In article | |||
| [15] | Ganchev K. On the Synthesis of Manipulator Drive Mechanism of Hydraulic Excavators. American Journal of Mechanical Engineering. 2022; 10(1): 28-33. | ||
| In article | |||
| [16] | Bu F. and B. Yao. Nonlinear Adaptive Robust Control of Hydraulic Actuators Regulated by Proportional Directional Control Valves with Deadband and Nonlinear Flow Gains. Proceedings of the 2000 American Control Conference. ACC (IEEE Cat. No.00CH36334), June 2000. | ||
| In article | View Article | ||
| [17] | Kim JW, Jung S, Kim J, et al. Optimal design of the front linkage of a hydraulic excavator for multi-objective function. J Mech Sci Technol 2014; 28: 3103–3111. | ||
| In article | View Article | ||
| [18] | Zou Z., Chen J. and Pang X., “Optimum dimensional synthesis for the working mechanism of a hydraulic excavator to improve the digging performance”. SAGE journals, Oct. 2017. | ||
| In article | View Article | ||
| [19] | Petrovic G., Pavlovic J., Madic M. and Marinkovic D., “Optimal Synthesis of Loader Drive Mechanisms: A Group Robust Decision-Making Rule Generation Approach”. Machines 2022, 10(5), 329. | ||
| In article | View Article | ||
| [20] | Jovanovich V., Janosevic D., Pavlovic J. Analysis of the influence of the digging position on the loading of the slewing platform bearing in hydraulic excavators. Facta Universitatis, Series: Mechanical Engineering Vol. 19, No 4, 2021, pp. 705–718. | ||
| In article | View Article | ||
Published with license by Science and Education Publishing, Copyright © 2023 Krasimir Ganchev
![]() This work is licensed under a Creative Commons Attribution 4.0 International License. To view a copy of this license, visit
https://creativecommons.org/licenses/by/4.0/
This work is licensed under a Creative Commons Attribution 4.0 International License. To view a copy of this license, visit
https://creativecommons.org/licenses/by/4.0/
| [1] | Myszka D., Machines and mechanisms: applied kinematic analysis-4th ed. Pearson Education, Inc., publishing as Prentice Hall, 2012. | ||
| In article | |||
| [2] | Bu F. and Yao B., “Nonlinear model based coordinated adaptive robust control of electro-hydraulic robotic arms via overparametrizing method”. February 2001, in - IEEE International Conference on Robotics and Automation 4: Proceedings, 3459-3464, vol. 4. | ||
| In article | |||
| [3] | Valdiero A., Guenther R., De Pieri E. and Negri V. (2013). “Cascade Control of Hydraulically Driven Manipulators With Friction Compensation”. International Journal of Fluid Power, March 2007, 8(1): 7-16. | ||
| In article | View Article | ||
| [4] | Hao W., “Analysis report of 2010 excavator market in China,” Construction Machinery Technology & Management, vol. 2, article 23, 2011. | ||
| In article | |||
| [5] | Ni T., Zhang H, Yu C., Zhao D. and Liu S., “Design of highly realistic virtual environment for excavator simulator”. Computers and Electrical Engineering, vol. 39, no. 7, pp. 2112-2123, 2013. | ||
| In article | View Article | ||
| [6] | Xu J. and Yoon H-S., “A Review on Mechanical and Hydraulic System Modeling of Excavator Manipulator System”. Journal of Construction Engineering. Volume 2016, Article ID 9409370. | ||
| In article | View Article | ||
| [7] | Gnasa U., Thielecke K., Modler K-H. and Richter E-R., “Design and development of a hydraulic manipulator with mechanism/Pro”. International ADAMS users’ Conference, Berlin, 17-18 Nov 1999. | ||
| In article | |||
| [8] | Mitrev R., “Web Based Enviroment for Design and Analysis of Hydraulic Escavator”. Journal of Multidisciplinary Engineering Science and Technology (JMEST), Vol. 2, Issue 12, December 2015. | ||
| In article | |||
| [9] | Patel D., Patel B. and Patel M., “A Critical Review on Kinematics of Hydraulic Excavator Backhoe Attachment”. Int. J. Mech. Eng. & Rob. Res. Vol. 4, No. 2, April 2015. | ||
| In article | |||
| [10] | Ganchev K., “Inverted Slider-Crank Mechanism Driven by Hydraulic Cylinder: Transfer Functions and Approximations”, Engineering Mathematics. Volume 6, Issue 1, June 2022, pp. 1-5. | ||
| In article | |||
| [11] | Ganchev K., “Synthesis of Slider-Crank Mechanism Driven by Hydraulic Cylinder”. Mechanika na Mashinite, 34/2001, pp. 75-95. | ||
| In article | |||
| [12] | Koev P. and Vitliemov V., “Тwo-Criterion Optimization Kinematic Synthesis of Slider-Crank Mechanism”. Mechanika na Mashinite, vol.5 (20), 4/1997, pp. 30-34. | ||
| In article | |||
| [13] | Mitrev R. and Todorov T., “Multicriteria Optimal Selection of a Hydraulic Cylinder for Drive Mechanisms”. FME Transactions, 49/2021, 501-510. | ||
| In article | View Article | ||
| [14] | Pavlovic J., Janosevic D. and Jovanovic V., “Optimization of manipulator drive mechanisms of hydraulic excavators on the basis of the tribological criterion”. Scientia Iranica, B (2020), 27(5), 2372-2381. | ||
| In article | |||
| [15] | Ganchev K. On the Synthesis of Manipulator Drive Mechanism of Hydraulic Excavators. American Journal of Mechanical Engineering. 2022; 10(1): 28-33. | ||
| In article | |||
| [16] | Bu F. and B. Yao. Nonlinear Adaptive Robust Control of Hydraulic Actuators Regulated by Proportional Directional Control Valves with Deadband and Nonlinear Flow Gains. Proceedings of the 2000 American Control Conference. ACC (IEEE Cat. No.00CH36334), June 2000. | ||
| In article | View Article | ||
| [17] | Kim JW, Jung S, Kim J, et al. Optimal design of the front linkage of a hydraulic excavator for multi-objective function. J Mech Sci Technol 2014; 28: 3103–3111. | ||
| In article | View Article | ||
| [18] | Zou Z., Chen J. and Pang X., “Optimum dimensional synthesis for the working mechanism of a hydraulic excavator to improve the digging performance”. SAGE journals, Oct. 2017. | ||
| In article | View Article | ||
| [19] | Petrovic G., Pavlovic J., Madic M. and Marinkovic D., “Optimal Synthesis of Loader Drive Mechanisms: A Group Robust Decision-Making Rule Generation Approach”. Machines 2022, 10(5), 329. | ||
| In article | View Article | ||
| [20] | Jovanovich V., Janosevic D., Pavlovic J. Analysis of the influence of the digging position on the loading of the slewing platform bearing in hydraulic excavators. Facta Universitatis, Series: Mechanical Engineering Vol. 19, No 4, 2021, pp. 705–718. | ||
| In article | View Article | ||



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}