It was confirmed that the results given by the integral factor method showed the delaying of response in the numerical experiments using the advection-diffusion equation. However, the exponential solutions given by the integral factor method were not very smooth compared to the analytically correct solution. On the other hand, a delay in the exponential solution was clearly found for an increasing time increment. Therefore it is important to make the time increment shorter step by step, to check the delaying when applying this integral factor method. It would be expected that the exponential solution given by the integral factor analysis method shown here would have the same expression. That would mean that this method had great potential and could be widely used.
For engineers, for example, a basic ability to solve partial differential equations is often needed. Some of the equations include terms of the first and second orders of the differential of the distance, and some include a diffusion term, as the advection–diffusion equation that follows.
 | (1) |
In which,  is distance,
is distance,  is time,
is time,  and
and  are the constant.
are the constant.
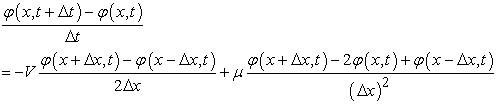
The right-hand side of equation (1) is often converted to a finite differential expression for distance. In such a case, equation (1) will be an ordinal differential equation to which, sometimes, the integral factor method can be applied.
Kitagawa and Muramaki 1 show that, about the solution given by the integral factor method, there is no cut-off error due to  and no numerical instability caused by an increase in the discrete step length
and no numerical instability caused by an increase in the discrete step length  for time
for time  The solution from the integral factor method is expressed as an exponential function. It is therefore the same as the solution using the method called the exponential finite difference method (Inan and Bahadir 2). The “explicit exponential finite difference method” was originally developed by Bhattacharya 3. It seems that there are two ways to develop the original method. The first is to make the basic scheme of the equation implicit 2, and the other is to make the exponential function have a larger order, following the exponential Taylor method (Koskela and Ostermann 4), or to add the optional term, (Ayinde and Ibijola 5).
The solution from the integral factor method is expressed as an exponential function. It is therefore the same as the solution using the method called the exponential finite difference method (Inan and Bahadir 2). The “explicit exponential finite difference method” was originally developed by Bhattacharya 3. It seems that there are two ways to develop the original method. The first is to make the basic scheme of the equation implicit 2, and the other is to make the exponential function have a larger order, following the exponential Taylor method (Koskela and Ostermann 4), or to add the optional term, (Ayinde and Ibijola 5).
On the other hand, the potential for the application of the integral factor method is so great that the equation is needless to include a diffusive term (see Figure 1). In engineering, the exponential solution given by applying the integral factor method looks very helpful because there is no rigid condition on getting a stabilized solution. This had been used in a real application in soil science, for example by Kajisa and Ermolin 1. However the property of the errors of this method still does not seem clear. Therefore, engineers need to know the kind of incorrect solution that can appear in this stabilized solution. For discussion, in this paper, the integral factor method is applied to equation (1).
As the explicit method to solve equation (1), the following transformed equation is often used.
 | (2-a) |
The solution  is given analytically as follows:
is given analytically as follows:
 | (3-a) |
Because in this paper we are interested in the explicit method,  includes no
includes no  term, as follows:
term, as follows:
 | (4-a) |
The solution is expressed as follows from (3-a):
 | (5-a) |
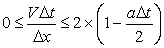
From Savović and Djordjevich 6, the next two equations are used as the conditions for the solution.
 | (6-a) |
 | (7-a) |
In which,
 | (8) |
The method in which equations (2-a)-(7-a) are used is hereafter called method A.

To make the correctness up,  in equation (4-a) is changed to
in equation (4-a) is changed to  which includes the continuous time from
which includes the continuous time from  to
to  Although only the summarized ordinary differential equation is shown in the reference, we accept it as follows.
Although only the summarized ordinary differential equation is shown in the reference, we accept it as follows.
 | (2-b) |
Therefore,
 | (3-b) |
in which, not only  but also
but also  do not include
do not include 
 | (4-b) |
The parameter  do not included
do not included  Therefore, it is defined as a constant in this paper. The
Therefore, it is defined as a constant in this paper. The  that appears in the right-hand side in equation (4-a) is treated as
that appears in the right-hand side in equation (4-a) is treated as  in equation (1), in which
in equation (1), in which  changes from
changes from  to
to  continuously.
continuously.
The solution  is given analytically as follows, by integrating (3-b) for time from
is given analytically as follows, by integrating (3-b) for time from  to
to  .
.
 | (5-b) |
The aim of this paper is to discuss the properties of using equation (5-b), as compared with equation (5-a).
In 7, the method using (3-b) is called the “integral factor method”. From 7, since the integral factor method solves the equation analytically, the cut-off error due to  does not occur if there is no numerical instability caused by the increasing
does not occur if there is no numerical instability caused by the increasing  Although in 1 we proposed the next equation (9) as the condition for the use of (5-b), only (6-a) is used in this paper, because it is duplicated.
Although in 1 we proposed the next equation (9) as the condition for the use of (5-b), only (6-a) is used in this paper, because it is duplicated.
 | (9) |
The method in which equations (2-b)-(5-a) are used is called method B hereafter.
2.3. The Analytical Solutions (Method C)Because the correct analytical solutions are different according to the initial or boundary conditions, the solutions were shown and discussed in a style of the step response and the impulse response as following the system engineering. The analytical method here is hereafter called method C.
As the conditions, the next three equations are used for the step response.
 |
 |
 |
For such conditions, the analytical solution is as follows 6:
 | (10) |
 | (11) |
As the conditions, the next three equations are used for the impulse response.
 |
 |
 |
For such conditions, the analytical solution is as follows:
 | (12) |
Hereafter, the suffixes  and
and  are used to express the distance
are used to express the distance  and time
and time 
 | (13) |
 | (14) |
For the three predicted methods, the three simulations that follow (case 1, case 2, and case 3) are carried out for discussion purposes. The properties of these simulations are shown in Table 1. In any case in Table 1, the conditions shown in (6-a) and (7-a) are not strongly satisfied for the purposes of this paper.
For the experiment, as an example,  is 1,
is 1,  for
for  is 200. In Table 1, time
is 200. In Table 1, time  is defined as the time used in the impulse response, with 10 as an example.
is defined as the time used in the impulse response, with 10 as an example.
Because  is 0.25, 0.50, 0.75,
is 0.25, 0.50, 0.75,  for
for  is 40, 20, and 14 for case 1, 2, and 3, respectively. Time
is 40, 20, and 14 for case 1, 2, and 3, respectively. Time  defined as the time for showing the results is 36. Therefore,
defined as the time for showing the results is 36. Therefore,  for
for  is 144, 72, and 48 for case 1, 2, and 3, respectively.
is 144, 72, and 48 for case 1, 2, and 3, respectively.

The solutions are given by the three methods A, B, and C for cases 1, 2, and 3. The results for the step response are shown in Figure 2 and Figure 3. After that, the results for the impulse response are shown in Figure 4 and Figure 5.
In Figure 2, for the finite difference method (method A), the numerical instability is shown only for case 3, for which the conditions of equation (6-a) and (7-a) are not satisfied.
In Figure 3, for the integral factor method (method B), no numerical instability is shown, as predicted. The delay made by method B compared with the correct solution by method C gets larger for the cases from 1 to 3.
In Figure 4, for the finite difference method (method A), numerical instability is shown only for case 3. In detail, the peak of case A was larger than the peak given by the correct method C in case 2.
In Figure 5, for the integral factor method (method B), no numerical instability is shown, as predicted. The delaying made by method B compared with the correct solution by method C gets larger for the cases from 1 to 3. In detail, the peak is smaller than the correct solution by the method C in case 2.


Before looking at the results, it would have been presumed that the solutions would show a moving average by method B, because it is known to show no instability. However, the six graphs of results by method B shown in Figure 2 and Figure 5 are not very smooth compared with the correct solution by method C. We note a delay in Figure 3 and Figure 5, and the smoothing is not easy to see. The peak value would not have the large error.
By both method B and C, the result for case 1 seems better than that for case 2. Therefore it is important for engineers to test how their results change by setting  to be smaller and smaller after getting the first solution. The instability often stops the simulation system. Therefore, Method B that show no instability, would be helpful for the engineers. The delaying will be almost the only weak point for the engineering to take care.
to be smaller and smaller after getting the first solution. The instability often stops the simulation system. Therefore, Method B that show no instability, would be helpful for the engineers. The delaying will be almost the only weak point for the engineering to take care.
1. It was confirmed that the results given by the integral factor method showed the delaying of response in the numerical experiments using the advection-diffusion equation.
2. For applying this method, the basic equation model are needless to have the exact diffusion term. That would mean that this method have the ability to be widely used to get the smoothed solution.
3. For this kind of exponential solution, there will be no instability to stop any numerical simulation. Therefore, it is recommended that the delaying to be checked by making the time increment shorter and shorter.
The term “integral factor method” is used to mean “exponential Taylor method (of the first order)” in this paper. Additionally, “the exponential function method” and the “exponential finite difference method” are almost the same here. Some of these terms seem to be used for engineering studies and others for mathematics studies. They are not distinguished here in detail, because we have mentioned the explicit first order problem.
| [1] | Kajisa T., Ermolin Y., The stabilized answer of diffusion equation for unsteady 3-D unsaturated subsurface flow analysis, December 2000, International Agricultural Engineering Conference, Asian Institute of Technology, Thailand, 2000. https://www.researchgate.net/publication/343787565. | ||
| In article | |||
| [2] | Inan B., A.R. Bahadir, Numerical solution of the one-dimensional Burgers' equation: Implicit and fully implicit exponential finite difference methods, Pramana, 2013. https://link.springer.com/article/10.1007/s12043-013-0599-z. | ||
| In article | View Article | ||
| [3] | Bhattacharya M.C., Int. J. Numer. Methods Eng. 21, 239 (1985). | ||
| In article | View Article | ||
| [4] | Koskela A. and Ostermann A., Exponential Taylor methods: Analysis and implementation, A Ostermann - Computers & Mathematics with Applications, 65, 487-499, 2013. | ||
| In article | View Article | ||
| [5] | Ayinde S.O., Ibijola E.A., A new Numerical Method for Solving First Order Differential Equtions, American journal of Applied Mathematics and Statistics, vol. 3, no. 4, 2015: 156-160. | ||
| In article | |||
| [6] | Savović S., Djordjevich A., Explicit finite difference solution of for contaminant transport problems with constant and oscillating boundary conditions, Thermal Science, May 2020. | ||
| In article | View Article | ||
| [7] | Kitagawa M., Murakami Y., Stable and highly accurate numerical solution of nonlinear wave equations, New progress in research on nonlinear wave phenomena, Research Institute for Mathematical Sciences, 1800: 226-235, 2012 (in Japanese). | ||
| In article | |||
Published with license by Science and Education Publishing, Copyright © 2021 Kajisa T.
![]() This work is licensed under a Creative Commons Attribution 4.0 International License. To view a copy of this license, visit
http://creativecommons.org/licenses/by/4.0/
This work is licensed under a Creative Commons Attribution 4.0 International License. To view a copy of this license, visit
http://creativecommons.org/licenses/by/4.0/
| [1] | Kajisa T., Ermolin Y., The stabilized answer of diffusion equation for unsteady 3-D unsaturated subsurface flow analysis, December 2000, International Agricultural Engineering Conference, Asian Institute of Technology, Thailand, 2000. https://www.researchgate.net/publication/343787565. | ||
| In article | |||
| [2] | Inan B., A.R. Bahadir, Numerical solution of the one-dimensional Burgers' equation: Implicit and fully implicit exponential finite difference methods, Pramana, 2013. https://link.springer.com/article/10.1007/s12043-013-0599-z. | ||
| In article | View Article | ||
| [3] | Bhattacharya M.C., Int. J. Numer. Methods Eng. 21, 239 (1985). | ||
| In article | View Article | ||
| [4] | Koskela A. and Ostermann A., Exponential Taylor methods: Analysis and implementation, A Ostermann - Computers & Mathematics with Applications, 65, 487-499, 2013. | ||
| In article | View Article | ||
| [5] | Ayinde S.O., Ibijola E.A., A new Numerical Method for Solving First Order Differential Equtions, American journal of Applied Mathematics and Statistics, vol. 3, no. 4, 2015: 156-160. | ||
| In article | |||
| [6] | Savović S., Djordjevich A., Explicit finite difference solution of for contaminant transport problems with constant and oscillating boundary conditions, Thermal Science, May 2020. | ||
| In article | View Article | ||
| [7] | Kitagawa M., Murakami Y., Stable and highly accurate numerical solution of nonlinear wave equations, New progress in research on nonlinear wave phenomena, Research Institute for Mathematical Sciences, 1800: 226-235, 2012 (in Japanese). | ||
| In article | |||





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}