In this paper, we study a unique common fixed point theorem for four self mappings in dislocated metric spaces, which generalizes, extends and improves some of the recent results existing in the literature.
In 2000, Hitzler and Seda 2 have introduced the notion of dislocated metric space in which self distance of a point need not be equal to zero and also generalized the Banach contraction principle in this dislocated metric space. Later on some of the authors like Aage, Salunke 1, sufati 3 and Shrivastava et.al., 5 have proved some fixed point theorems in dislocated metric space. In 2012, Jha and Panti 4 have proved some fixed point theorems for two pairs of weakly compatible maps in dislocated metric space. In this paper, we study a unique common fixed point theorem for four self mappings in dislocated metric space, which generalizes, extends and improves some known results existing in the references.
The following definitions are due to Hitzler and Seda 2 .
Definition 2.1 2. Let X be a non-empty set and let d: X × X→ [0,∞) be a function satisfying the following conditions
(i) d(x, y) = d(y,x).
(ii) d(x, y) = d(y, x) = 0 ⇒ x = y.
(iii) d(x, y) ≤ d(x, z) + d(z, y) for all x, y, z ϵ X.
Then d is called dislocated metric or d-metric on X.
Definition 2.2 2. A sequence {xn} in a d-metric space (X, d) is called a Cauchy sequence if for given ∊ > 0 , there exists n0 ∊ℕ such that for all m, n ≥ 0, we have d(xm, xn) < ϵ.
Definition 2.3 2. A sequence {xn} in a d-metric space (X, d) converges with respect to d if there exists x ∊ X such that d(xn, x) → 0 as n→∞.
Definition 2.4 2. A d-metric space (X, d) is called complete if every Cauchy sequence is convergent with respect to d.
Definition 2.5 2. Let T and S be mappings from a metric space (X, d) itself. Then T and S are said to be weakly compatible if they commute at their coincidence point, that is, Tx = Sx for some x∊X ⇒ TSx = STx.
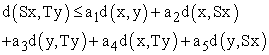
Theorem 3.1. Let (X, d) be a complete d-metric space. Suppose S,T, I and J: X→X are continuous mappings satisfying :
 | (1) |
for all x, y ϵ X, where ai ≥ 0 (i = 1,2,3,4,5), a1 + a2 + a3 +2a4 +2a5 < 1.
If S(X) ⊆ J(X), T(X) ⊆ I(X), and if the pairs (S, I) and (T, J) are weakly compatible then S,T, I and J have unique common fixed point.
Proof. Let x0 be an arbitrary point in X.
Since S(X)⊆ J(X), T(X)⊆I(X) there exists x1, x2 ϵ X Such that Sx0 = Jx1, Tx1 = Ix2 . Continuing this process, we define {xn} by Jx2n+1 = Sx2n , Ix2n+2 = Tx2n+1 , n = 0,1,2….. Denote y2n = Jx2n+1 = Sx2n , y2n+1 = Ix2n+2 = Tx2n+1 , n = 0,1,2…..
If y2n = y2n+1 for some n, then Jx2n+1 = Tx2n+1. Therefore, x2n+1 is a coincidence point of J and T. Also if y2n+1 = y2n+2 for some n, then Ix2n+2 = Sx2n+2. Therefore, x2n+2 is a coincidence point of I and S. Assume that If y2n ≠ y2n+1 for all n. Then we have,
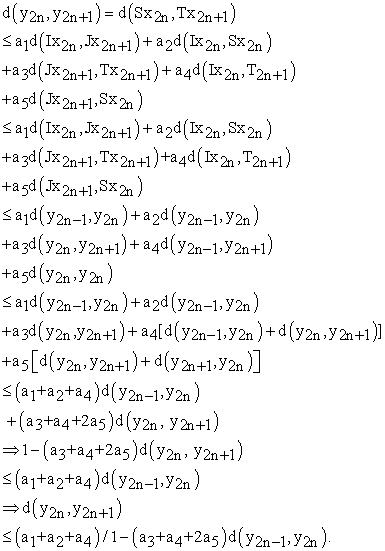 |
Letting, b = (a1 + a2 + a4 )/1-( a3 + a4 + 2a5) < 1.
 |
This shows that
 |
For every integer m > 0, we have
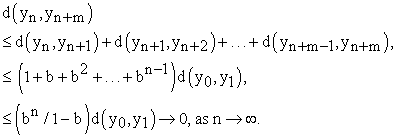 |
Therefore, d(yn, yn+m) → 0.
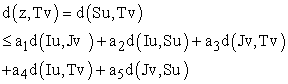
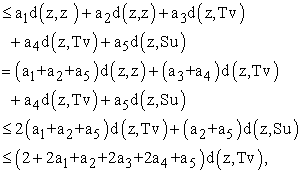
⇒ {yn} is a Cauchy sequence in a complete d-metric space. So there exists a point zϵX such that yn → z. Therefore, the subsequences {Sx2n}→ z, {Jx2n+1}→ z, {Tx2n+1}→ z and {Ix2n+2}→ z. Since, T(X) ⊆ I(X), there exists a point uϵX such that z = Iu. Then we have by (1)
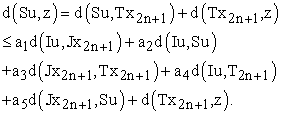 |
Letting n→∞ we get that
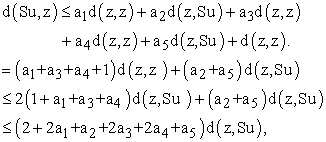 |
which is a contradiction. So Su = z = Iu. Since, S(X)⊆J(X), there exists a point vϵX such that z = Jv.
We claim that z = Tv. If z ≠ Tv. Then
 |
 |
which is a contradiction. So we get that z = Tv.
Therefore, Su = Iu = Tv = Jv = z. That is z is a common fixed point of S, T, f and g.
Finally in order to prove that the uniqueness of z. Suppose that z and z1, z ≠ z1 , are common fixed points of S, T, f and g respectively. Then by (1), we have
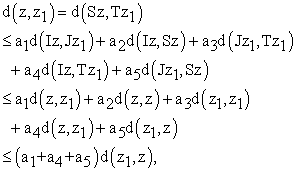 |
which is a contradiction, since a1 + a2 + a3 +2a4 +2a5 < 1. Therefore, z = z1.
Hence, z is the unique common fixed point of S, T, f and g respectively.
Remark 3.2. If we choose f = g = I is an identity mapping in the above Theorem3.1, then we get the following corollary.
Corollary 3.3. Let (X, d) a complete d-metric space. Let S, T: X→X be continuous mappings satisfying the following
 |
for all x, yϵX, where ai ≥ 0 (i = 1,2,3,4,5), a1 + a2 + a3 +2a4 +2a5 < 1.
Then S, and T have unique common fixed point.
Remark 3.4. If we choose S = T in the above Theorem 3.1, then we get the following corollary
Corollary 3.5. Let (X, d) a complete d-metric space. Let S, T: X→X be continuous mappings satisfying the following
 |
for all x, yϵX, where ai ≥ 0 (i = 1,2,3,4,5), a1 + a2 + a3 +2a4 +2a5 < 1.
Then T has a unique common fixed point.
| [1] | C.T. Aage and J. N. Salunke, The results on fixed point theorems in dislocated and dislocated quasi –metric space, Applied Math. Sci., 2 (59) (2008), 2941-2948. | ||
| In article | |||
| [2] | P. Hitzler and A. K. Seda, Dislocated topologies, J. Electr. Engg., 51(12/s) (2000), 3-7. | ||
| In article | View Article | ||
| [3] | A. Isufati, Fixed point theorems in dislocated quasi metric space, Applied Mathematical Science, 4(5)(2010), 217-223. | ||
| In article | |||
| [4] | K. Jha and D. Panti, A common fixed point theorem in dislocated metric space, Applied Mathematical Science, Vol.6., no. 91., (2012). 4497-4503. | ||
| In article | View Article | ||
| [5] | R. Shrivastava, Z.K. Ansari and M. Sharma, Some results on fixed points in dislocated and dislocated quasi-metric spaces, Journal of Advanced Studies in Topology, 3(1), (2012), 25-31. | ||
| In article | View Article | ||
Published with license by Science and Education Publishing, Copyright © 2018 K. Prudhvi
![]() This work is licensed under a Creative Commons Attribution 4.0 International License. To view a copy of this license, visit
http://creativecommons.org/licenses/by/4.0/
This work is licensed under a Creative Commons Attribution 4.0 International License. To view a copy of this license, visit
http://creativecommons.org/licenses/by/4.0/
| [1] | C.T. Aage and J. N. Salunke, The results on fixed point theorems in dislocated and dislocated quasi –metric space, Applied Math. Sci., 2 (59) (2008), 2941-2948. | ||
| In article | |||
| [2] | P. Hitzler and A. K. Seda, Dislocated topologies, J. Electr. Engg., 51(12/s) (2000), 3-7. | ||
| In article | View Article | ||
| [3] | A. Isufati, Fixed point theorems in dislocated quasi metric space, Applied Mathematical Science, 4(5)(2010), 217-223. | ||
| In article | |||
| [4] | K. Jha and D. Panti, A common fixed point theorem in dislocated metric space, Applied Mathematical Science, Vol.6., no. 91., (2012). 4497-4503. | ||
| In article | View Article | ||
| [5] | R. Shrivastava, Z.K. Ansari and M. Sharma, Some results on fixed points in dislocated and dislocated quasi-metric spaces, Journal of Advanced Studies in Topology, 3(1), (2012), 25-31. | ||
| In article | View Article | ||


