 OPEN ACCESS
OPEN ACCESS  PEER-REVIEWED
PEER-REVIEWED
Fermat Collocation Method for Solvıng a Class of the First Order Nonlinear Differential Equations
Dilek Taştekin1, Salih Yalçinbaş1,
1Department of Mathematics Celal Bayar University, Muradiye, Manisa, Turkey
Abstract
In this study, we present a reliable numerical approximation of the some first order nonlinear ordinary differential equations with the mixed condition by the using a new Fermat collocation method. The solution is obtained in the form of a truncated Fermat series with easily determined components. Also, the method can be used to solve Riccati equation. The numerical results show the effectuality of the method for this type of equations. Comparing the methodology with some known techniques shows that the existing approximation is relatively easy and highly accurate.
At a glance: Figures
Keywords: Nonlinear ordinary differential equations, Riccati equation, Fermat polynomials, collocation points
Journal of Mathematical Sciences and Applications, 2014 2 (1),
pp 4-9.
DOI: 10.12691/jmsa-2-1-2
Received January 14, 2014; Revised February 01, 2014; Accepted February 25, 2014
Copyright © 2013 Science and Education Publishing. All Rights Reserved.Cite this article:
- Taştekin, Dilek, and Salih Yalçinbaş. "Fermat Collocation Method for Solvıng a Class of the First Order Nonlinear Differential Equations." Journal of Mathematical Sciences and Applications 2.1 (2014): 4-9.
- Taştekin, D. , & Yalçinbaş, S. (2014). Fermat Collocation Method for Solvıng a Class of the First Order Nonlinear Differential Equations. Journal of Mathematical Sciences and Applications, 2(1), 4-9.
- Taştekin, Dilek, and Salih Yalçinbaş. "Fermat Collocation Method for Solvıng a Class of the First Order Nonlinear Differential Equations." Journal of Mathematical Sciences and Applications 2, no. 1 (2014): 4-9.
| Import into BibTeX | Import into EndNote | Import into RefMan | Import into RefWorks |
1. Introduction
Nonlinear ordinary differential equations are frequently used to model a wide class of problems in many areas of scientific fields; chemical reactions, spring-mass systems bending of beams, resistor-capacitor-inductance circuits, pendulums, the motion of a rotating mass around another body and so forth [1, 2]. These equations here also demonstrated their usefulness in ecology, economics, biology, astrophysics and engineering. Thus, methods of solution for these equations are of great importance to engineers and scientists [3, 4].
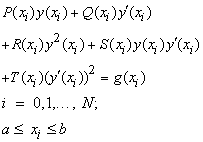
In this paper, for our aim we consider the first order nonlinear ordinary differential equation of the form
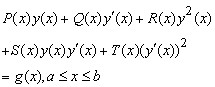 | (1) |
under the mixed conditions
 | (2) |
and look for the approximate solution in the form
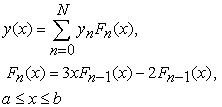 | (3) |
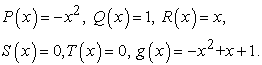
which is a Fermat polynomial of degree N, where yn(n = 0,1,…,N)are the coefficients to be determined. Here P(x), Q(x), R(x), S(x), T(x) and g(x) are the functions defined on a≤x≤b; the real coefficients α,β and λ are appropriate constants. Note that, if S(x)=T(x)=0 in Eq. (1), it is a Riccati Equation [7, 8, 9].
2. Fundamental Matrix Relations
Our aim is to find the matrix form of each term in the nonlinear equation given by Eq. (1). Firstly, we consider the solution y(x) defined by a truncated series (3) and then we can convert to the matrix form
 | (4) |
where
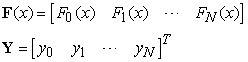 |
If we differentiate expression (4) with respect to x, we obtain
 | (5) |
where
 |
On the other hand, the matrix form of expression y2(x) is obtained as
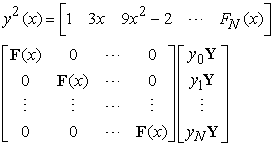 |
or briefly
 | (6) |
where
 |
By using the expression (4), (5) and (6) we obtain
 | (7) |
Following a similar way to (6), we have
 | (8) |
where
 |
3. Matrix Relations Based on Collocation Points
Let us use the collocation points defined by
 | (9) |
in order to
 |
By putting the collocation points (9) into Eq. (1), we get the equation
 | (10) |
By using the relations (4), (5), (6), (7) and (8); the system (10) can be written in the matrix form
 |
or shortly
 | (11) |
where
 |
4. Method of Solution
The fundamental matrix equation (11) corresponding to Eq. (1), can be written as
 |
or
 | (12) |
where
 |
We can find the corresponding matrix equation for the condition (2), using the relation (4), as follows:
 | (13) |
so that
 |
We can write the corresponding matrix form (13) for the mixed condition (2) in the augmented matrix form as
 | (14) |
where
 |
To obtain the approximate solution of Eq. (1) with the mixed condition (2) in the terms of Fermat polynomials, by replacing the row matrix (14) by the last row of the matrix (11), we obtain the required augmented matrix:
 |
or the corresponding matrix equation
 | (15) |
where
 |
The unknown coefficients set {y0,…,yn} can be determined from the nonlinear system (15). As a result, we can obtain approximate solution in the truncated series form (3).
5. Accuracy of Solution
We can check the accuracy of the solution by following procedure [11, 12, 13]: The truncated Fermat series in (3) have to be approximately satisfying Eq. (1); that is, for each x=xi∈[a,b], i=1,2,…
 |
and E(xi)≤10-ki (ki is any positive integer).
If max(10-ki)=10-k (k is any positive integer) is prescribed, then the truncation limit N is increased until the difference E(xi) at each of the points xi becomes smaller than the prescribed 10-k.
6. Numerical Examples
In this section, two numerical examples are given to illustrate the accuracy and efficiency of the presented method.
Example 6.1. [14] Let us first consider the first-order nonlinear differential equation
 | (16) |
with condition
 |
and the approximate solution y(x) by the truncated Taylor polynomial
 |
where
 |
For N=2 the collocation points become
 |
From the fundamental matrix equations for the given equation and condition respectively are obtained as
 |
and
 |
so that
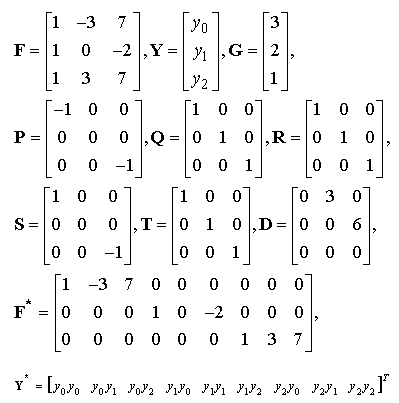 |
The augmented matrix for this fundamental matrix equation is calculated
 |
From the obtained system, the coefficients y0,y1 and y2 are found as y0=0, y1=1/3 and y2=0.
Hence we have the Fermat polynomial solution
 |
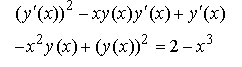
Example 6.2. [14] Consider the following nonlinear differential equation given by
 | (17) |
with the initial condition
 |
So that
 |
For N=2 the collocation points become
 |
From the fundamental matrix equations for the given equation and condition respectively are obtained as
 |
and
 |
so that
 |
The augmented matrix for this fundamental matrix equation is calculated
 |
From the obtained system, the coefficients y0,y1 and y2 are found as y0=0, y1=1/3 and y2=0.
Hence we have the Fermat polynomial solution
 |
Example 6.3. Consider the following nonlinear differential equation given by
 | (18) |
with the initial condition
 |
So that
 |
The solutions obtained for N=2,5,7 are compared with the exact solution is ex, which are given in Figure 1.We compare the numerical solution and absolute errors for N=2,5,7 in Table 1.


 PowerPoint Slide
PowerPoint Slide Larger image(png format)
Larger image(png format)
 View current table in a new window
View current table in a new window

 PowerPoint Slide
PowerPoint Slide Larger image(png format)
Larger image(png format)
Example 6.4. Let us first consider the first-order nonlinear differential equation
 | (19) |
with condition
 |
Taking N=3,5,7 we obtain the approximate solution of this nonlinear differential equation.
The values of this solution are compared with the exact solution is x+sinx and given errors in Table 2.

 PowerPoint Slide
PowerPoint Slide Larger image(png format)
Larger image(png format)

 PowerPoint Slide
PowerPoint Slide Larger image(png format)
Larger image(png format) View current table in a new window
View current table in a new window7. Conclusion
In this study, a new Fermat approximation method for the solution of a class of first order nonlinear differential equations has been presented. The principal advantage of this method is the capability to succeed in the solution up to all term of Fermat expansion. It is seen from Example 6.3 that Fermat collocation method gives well results for the different values N. To obtained numerical results show that accuracy improves when N is increased as shown from Example 6.4. Examples, tables and figures indicate that the present method is convenient, reliable and effective. Also it is important to note that Fermat coefficients of the solution are found very simply by using the computer programs [15].
References
| [1] | S. L. Ross, Differential Equations, John Wiley and sons, Inc.Newyork, 1974. | ||
 In article In article | |||
| [2] | L. M. Kells, Elementary Differential Equations, Mcgraw-Hill Book Company, Newyork, 1965. | ||
| In article | |||
| [3] | Ş. Nas, S. Yalçınbaş and M. Sezer, A Taylor polynomial approach for solving high-order linear Fredholm integro-differential equations, International Journal of Mathematical Education in Science and Technology 31(2), 213-225, 2000. | ||
| In article | CrossRef | ||
| [4] | S. Yalçınbaş and M. Sezer, The approximate solution of high-order linear Volterra–Fredholm integrodifferential equations in terms of Taylor polynomials, Applied Mathematics and Computation 112, 291-308, 2000. | ||
| In article | CrossRef | ||
| [5] | A. F. Horadam, University of New England, Armidale, Australia, 1983. | ||
| In article | |||
| [6] | L. Carliztz, Restricted Compositions, the Fibonacci Quarterly 14, 3, 254-264, 1976. | ||
| In article | |||
| [7] | M. Sezer, A method for the approximate solution of the second order linear differential equations in terms of Taylor polynomials, International Journal of Mathematical Education in Science and Technology 27(6), 821-834, 1996. | ||
| In article | CrossRef | ||
| [8] | S. Yalçınbaş, Taylor polynomial solutions of nonlinear Volterra-Fredholm integral equations, Applied Mathematics and Computation 127, 195-206, 2002. | ||
| In article | CrossRef | ||
| [9] | S. Yalçınbaş, K. Erdem, Approximate solutions of nonlinear Volterra integral equation systems, International Journal of Modern Physics B 24(32), 6235-6258, 2010. | ||
| In article | CrossRef | ||
| [10] | R. A. Adams, Calculus, Addison-Wesley Publihers Limited pp.562, 1990. | ||
| In article | |||
| [11] | M. Gulsu, M. Sezer, On the solution of the Riccati Equation by the Taylor Matrix Method, Applied Mathematics and Computation 176 pp. 414-421, 2006. | ||
| In article | CrossRef | ||
| [12] | K. Erdem, S.Yalçınbaş, Bernoulli Polynomial Approach to High-Order Linear Differential-Difference Equations, AIP Conference Proceedings, 1479, 360-364, 2012. | ||
| In article | CrossRef | ||
| [13] | S.Yalçınbaş, M.Aynigül, T.Akkaya, Legendre series solutions of Fredholm integral equations, Mathematical and Computational Applications, 15(3), 371-381, 2010. | ||
| In article | |||
| [14] | E. Küçükşahin, Taylor polynomial solutions of some first order nonlinear differantial equations, M. Sc. Thesis, Mugla University, 2008. | ||
| In article | |||
| [15] | D. Taştekin, S. Yalçınbaş, M. Sezer, Taylor collocation method for solving a class of the first order nonlinear differential equations, Mathematical and Computational Applications, vol.18, no.3, pp.383-391, 2013. | ||
| In article | |||

 CiteULike
CiteULike Delicious
Delicious

