 sciepub.com
sciepub.com
 Quick Submission
Quick Submission

Technical Solutions of Problems in the Handling of the Object with Non-consistent Surface
Peter Tuleja
Abstract
In the article discusses the procedure for analyzing the properties of object of manipulation, if the surface shows signs of anomalies in terms of its integrity and cohesion. It describes some procedures for solving of similar technical problems. Also deals with the technical resources necessary to manage the maintaining the safe grasp the object of manipulation in certain handling tasks.
Keywords: object of manipulation (OM), handling task, technical solution, non consistent surface
Copyright © 2016 Science and Education Publishing. All Rights Reserved.Cite this article:
- Peter Tuleja. Technical Solutions of Problems in the Handling of the Object with Non-consistent Surface. American Journal of Mechanical Engineering. Vol. 4, No. 7, 2016, pp 400-405. http://pubs.sciepub.com/ajme/4/7/31
- Tuleja, Peter. "Technical Solutions of Problems in the Handling of the Object with Non-consistent Surface." American Journal of Mechanical Engineering 4.7 (2016): 400-405.
- Tuleja, P. (2016). Technical Solutions of Problems in the Handling of the Object with Non-consistent Surface. American Journal of Mechanical Engineering, 4(7), 400-405.
- Tuleja, Peter. "Technical Solutions of Problems in the Handling of the Object with Non-consistent Surface." American Journal of Mechanical Engineering 4, no. 7 (2016): 400-405.
| Import into BibTeX | Import into EndNote | Import into RefMan | Import into RefWorks |
At a glance: Figures
1. Introduction
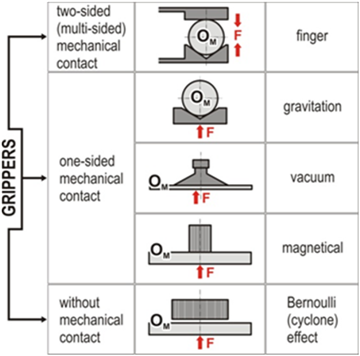
Handling tasks are not the prerogative of only the operations oriented on technique (mechanical engineering, electrical engineering and so on), where the prevails handling OM of solid and compact character. For the handling tasks in these operations is available a wide range of mastering the technical solutions. As a rule, grasping the principle of two sided (multisided) mechanical contact of gripping elements of the gripper with OM, but a significant proportion is also called. one-sided gripping, when the gripping force applied to the OM only from one side, Figure 1.
 Download as
Download as

In non-technical industrial branches such as food, textile, pharmaceutical, chemical industry and so on the increased need grasping of OM, which have a some specific characteristics: OM is often represented by a porous, non-solid surface and in a certain extent, fragile materials where are gripping effectors based on the principle of the jaws (finger) practically unusable.
In both of the above areas of production often occur case of handling with OM, which have a large area vastness, combined with the uneven distribution of matter.
From yet spoken, that there exists a relatively large group handling tasks where when selecting gripping elements to be considered in addition to the basic rules of safe grip (the balance of power between the mass and the mass distribution OM and gripping parameters of effector) and character the vastness and surface integrity or coherence OM.
This is particularly the case by grasping of objects whose surface is:
• cohesive but porous (foam, polyurethane foam, etc.);
• cohesive, but with a large number of openings (perforated sheets and perforated plastic plates);
• cohesive, but very fragile (glass sheets, glass jars, etc.);
• incohesive (it is a mixture of non-compact layers that are mutually easily separated, eg. pastry, biscuits, etc.).
To resolving these handling tasks is necessary to use unconventional means of gripping, which is mostly gripping effectors with one-sided (unilateral) gripping, Figure 2 [3].
 Download as
Download as
2. One-sided Gripping Effector
Solving object manipulation by means one sided gripping is determining the balance of forces resulting from the weight and distribution of material of the object to the operating gripping force of effector as well as the establishment of critical acceleration of the handling device (eg. of the robot) during handling task in order to maintain the basic requirements for safe handling [2]: grasp the object and your fixation durnig at all times of your handling.
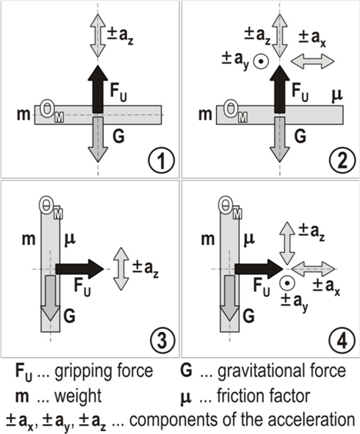
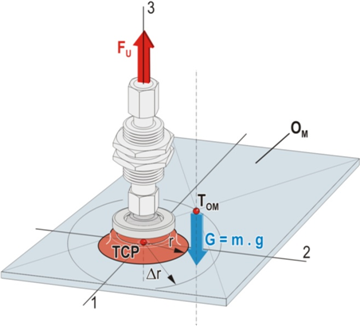
Because the gripping force is applied from one side only (does not exist fixation foothold), during the handling with the OM are formed depending on the orientation of the acceleration of handling additional forces that are directed generally tangentially to the power og grasping, Figure 3 [1].
 Download as
Download as
Then gripping force constitutes a normal component of its operations weakens inertia force due to the additional acceleration, which in the worst case could be the same orientation as the gravitational force of gravity, Table 1 [1].







As a component of force to create a balance with the forces induced by these accelerations are available only friction forces. Their size is proportional to the size of the contact area and the friction properties of materials in contact (e.g. a suction cup of the active OM), Table 1.
But this is valid only in cases where the frictional force actually exists, Figure 4.
 Download as
Download as
Na kontaktné sily pri jednostrannom uchopovaní nepriaznivo vplývajú aj prídavné momentové zaťaženia vyplývajúce z nesymetricky rozloženej hmoty OM. On the contact force in the one-sided gripping are non-positively affected the additional torque load resulting from asymmetrically spread over mass of OM.
In this case it is necessary for the calculation according to the case orientation additional acceleration in the calculations add positional factor  , Figure 5.
, Figure 5.
 Download as
Download as
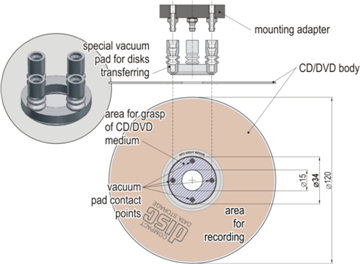
Last but not least choice of a suitable gripping effector will also affect the number and size of those parts of the surface of the OM, the gripping contact with effector that does not affect the user features. One example is the handling of CD/DVD discs in their manufacture, on the finalization of the manufacture is no longer authorized to touch the parts of the disk, which are intended for recording, Figure 6 [1]. The relatively large area of the disc is reduced to a small circular ring (in the picture, Figure 6, highlighted by hatching).
 Download as
Download as
So far abovementioned ratios have apply on the "standard" integrity of the surface of the manipulated object.
Besides the described features of the manipulated object above, the task in the assignment may occur more specific properties, such as e.g. surface characteristics OM Table 2, the characteristics of the material, the distribution of the material to the central axis of the end member handling mechanism, Figure 5, and so on.
Radically change if the surface is porous, perforated, or other means non-solid.
In these cases it is necessary to contemplate changes to the basic parameters of the gripping element, while reducing the horizontal component of the acceleration to a minimum and totally excluded orientation OM by cases of ƒ and „, Figure 3 and Table 1.
Table 2. Možnosti využitia uchopovacieho efektora v závislosti od mechanických vlstností materiálu OM





If you take a closer look on the Table 2, we can see that the finger gripping effectors are fully applicable for coherent also non-solid with solid and semi-soft substance of OM, wherein characteristics of the surface is more or less decided about your applicability.
The table omits the shape of OM and its flat vastness; then it loses their application on the number of representation, Table 3.
Table 3 distinguishes between rotating and non-rotating elements. In some cases, the OM be assessed also level of of the axial symmetry of the cross section, which, ideally, the rotary OM can be allocated also object with a cross section e.g. square or hexagonal shape. It is obvious that this category consists of specific limit category of OM.
In both groups the OM is for handling besides cross section also significant relationship between dimensions (Table 3).
It should be stressed that, in the Tab. 3 presented the possibility of using different ways of grasp OM are bound to the material used.




From yet spoken, it shows that the most unfavorable combination for handling tasks is extensive OM with non-solid structure, for example. perforated steel sheets, non-metallic perforated plate. In the electrical industry, from such as steel sheet is produced. covers for ventilation and some other products. At production volumes in electrical engineering it comes to automated process handling in mass production.
3. Specification of the Problem and Its Solution
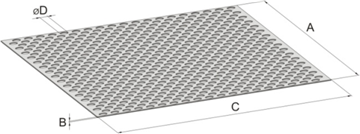
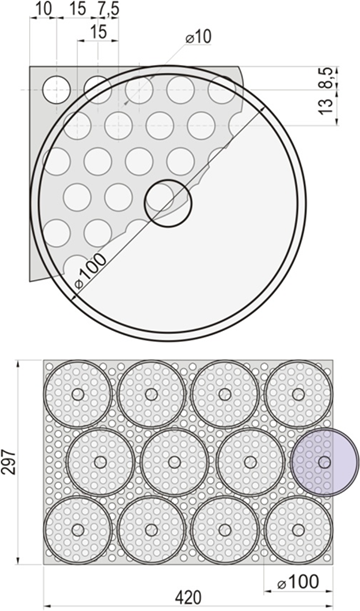
Consider, for example, the handling of a perforated sheet of A3 format (420x297 mm) and thickness 2 mm. Perforations consists 608 of equal circular opening with diameter D=10 mm, Figure 7. Such a slab should be handled in the horizontal direction at a speed of v=0,5 ms-1.
 Download as
Download as
Weight of the sheet by their material is in Table 4.




Considering the data presented in Table 2 and Table 3 of manipulation we know implement in several ways. As representatives of the material used, Table 4, we consider materials with different magnetic properties. The selection of a suitable gripping element, the result of superposition of the Table 2 and Table 3 to leave only the useful combination. Of course, the choice remains with the solver and his knowledge and practical experience.
3.1. Vacuum Cups UsingStandard effector gripping calculation [1, 4] is to determine the diameter of the suction cup (to determine the necessary gripping force) and in the event that one suction cup to implement the task of handling is not enough to set the number of suction cups, the condition required for the balance of forces during manipulation.
To determine the static gripping force will use the relation  , wherein for FU we will count the power of gravity G=m.g.
, wherein for FU we will count the power of gravity G=m.g.
From there, is expressed the value  . For the mass of plates of alloy steel (Table 3) then
. For the mass of plates of alloy steel (Table 3) then  . In the manufacturers' catalogs for manufactured range of made is for procedures the selection of a facing theoretical strength suction cup with respect to the working surface. This does not reflect the safety factor t=4. Calculated values need to multiply by
. In the manufacturers' catalogs for manufactured range of made is for procedures the selection of a facing theoretical strength suction cup with respect to the working surface. This does not reflect the safety factor t=4. Calculated values need to multiply by  . Thus, the diameter suction cup that would picked up the plate the mass is about 440 mm.
. Thus, the diameter suction cup that would picked up the plate the mass is about 440 mm.
Use a suction cup with this diameter keeps us from size of the board, as well so its perforation. This would effect the gripping forces of any suction cup completely zeroed. The suction cup requires coherent contact base. This would mean that we would have to use a larger number of smaller suction cups that we deploy on the sheet so that we can prevent the formation of tilting moments in terms of Figure 5.
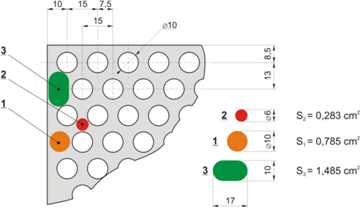
Detail of the arrangement of the holes on plate, however, we show that the maximum diameter of suction cup in view of the possibilities of location is max. 10 mm, Figure 8.
 Download as
Download as
For the theoretical force of suction cup with a diameter d=10 mm (pos. 2) at a relative vacuum pv=-80 kPa we can in catalog of the producer find the value FT=6,28 N. Is the theoretical power of grasp of suction cups therefore must be included yet the safety factor t:  . Effective gripping force of one suction cup to the selected action of acceleration is therefore only FU=1,57 N (if the acceleration applied only in the direction perpendicular to the plane of grasping: t=4 and if also acceleration activity is in the tangential direction of the plane too: t=8, it is only a FU=0,758 N).
. Effective gripping force of one suction cup to the selected action of acceleration is therefore only FU=1,57 N (if the acceleration applied only in the direction perpendicular to the plane of grasping: t=4 and if also acceleration activity is in the tangential direction of the plane too: t=8, it is only a FU=0,758 N).
From the balance of power  for steel plate (G=191,9 N) we get the need a number of suction cups n=123, resp n=254 suction cups.
for steel plate (G=191,9 N) we get the need a number of suction cups n=123, resp n=254 suction cups.
In the event that we decide to diameter of suction cups d=6 mm (pos. 1), their number would be even higher (340(!) sucction cup by t=4).
Active surface the oval suction cups is higher than that of the circular. For our case it would be with the size 10x17 mm her area be 1,485 cm2, which corresponds to the theoretical gripping force 11,88 N and if a take the account safety factor t=4 the number of required suction cups would be n=65. This overcharge a problem solution not only directly (acquisition costs for of suction cups) as well as secondary (operating costs for the generation of necessary volume of vacuum).
Therefore, for steel plate need to select a different type of the gripping element.
When using a sheet of aluminum respectively. PVC suction cups would be acceptable number (n=3 by t=4 a n=5 by t=8 for not plasticized PVC). For aluminum, these values amounted to approximately doubled, which is still acceptable.
3.2. Bernoulli Suction Cups UsingUse of the Bernoulli suction cups (Aventics, SMC) is technically possible, but the steel plate is required 22 suction cups with a diameter 100 mm (by theoretical holding force 35 N and by safety factor t=4), what byconsidered board dimensions (format A3: 297x420 mm) does not allow their real deployment, Figure 9.
 Download as
Download as
From the picture it is evident that already 12 suction cups with their whole surface did not reflect the surface of plate. Suction cup with a smaller diameter do not meet the balance of power.
By plates of aluminum, the their number decreased to 8, which already complies of planar arrangement. Similarly, for the plastics when the number of suction cups dropped to 4 (while preserving the safety coefficient t=4).
It will be necessary to consider the amount of acquisition costs, as Bernoulli suction cup are several times cost more than the vacuum cups.
3.3 Magnetic Grasp Element UsingIf we consider only the steel plate remained to us still be able to use magnetic gripping elements [2] (e.g. SCHMALZ, Figure 10). According to catalog data holding forces of these grippers represent the values from 8 N by diameter 20 mm to 250N by diameter 80 mm.
 Download as
Download as
This means that "the weakest" elements would need to use 96 units, "the strongest" 3 pieces (but considering that one such element weighs 830 grams, it can lead to enormous demands for load capacity of handling devices (robot).
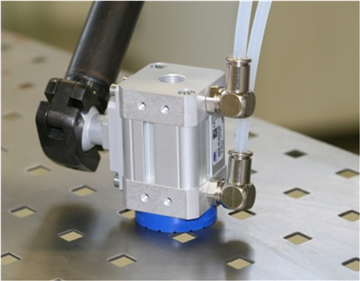
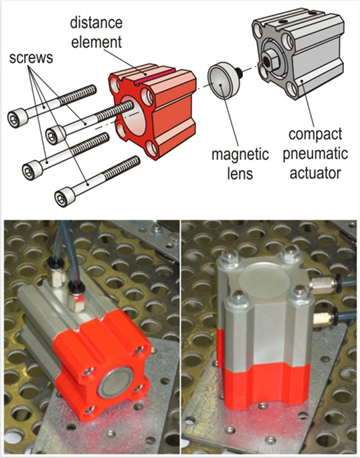
At our department, we verified experimentally the possibility of modifying a simple, compact pneumatic drive with separating inter-piece (plastic element as a product of the 3D printer) and the piston rod have strengthened commercially available from a magnetic lens (lens diameter 20 mm, thickness 6 mm, outer thread M6x10mm). This creates an alternative magnetic of the gripping element of the company SCHMALZ, Figure 11.
 Download as
Download as
The element properties, however, are interesting: static gripping force 140N, blanket demands 40x40mm and the number of required elements for lifting plates weighing 19.19 kg by safety factor t = 4 is a 6 pieces; for the t = 8 is the number of elements is 11.
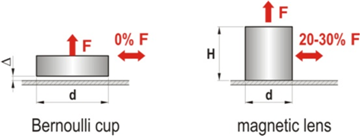
The gripping force of the magnetic element can be increased (in addition to increasing the area of the magnetic lens, and thus the magnetic surface of the gripping element) also his height (thickness), see Figure 12. This would built-up surface on the OM unchanged gripping qualities on the contrary, increased.
 Download as
Download as
It is clear that with increasing the holding force of the permanent magnet used will have to increase the diameter of the piston in using pneumatic actuator (power balance).
When using the magnetic elements must be recalculated if the frictional forces from the gripping element and surface quality are adequate based on the weight of the manipulated object and manipulation speed. Provided that this condition is fulfill then is valid the four cases shown in Figure 3, however, in cases ‚, ƒ and „ it is necessary to make an analysis of the values of the maximum permitted acceleration of handling equipment (eg. the robot).
On the cost for the implementation of application solutions is the best solution so far.
Because of completeness analysis it should be mentioned of the gripping members of solenoid type. This kind of gripping elements is clearly applicable under the same conditions as mentioned in the case of permanent magnets. Has been added, however, the problem of interference magnetized OM due to the electromagnetic field (residual magnetism) when you shut down the power of action requires the creation of magnetic reversal field and thus increasing the complexity of control warhead.
4. Conclusion
Analyzed the problems is undoubtedly an interesting topic in solving handling tasks in automated and robotized processes, since only correctly designed gripping elements (regardless of chosen physical essence) give a guarantee correctly grasp, fixation and release of OM in the handling with so complicated objects.
Acknowledgements
Contribution was originated with a support by project KEGA: Development of quality of life, creativity and motor skills disabilities and older people with support of the robotic devices (order No. 059TUKE-4-2014, head: prof. Hajduk; years 2014 - 2016).
References
| [1] | Hajduk, M., Tuleja, P.: Základy pneumatických mechanizmov I. - Výroba, úprava a rozvod stlačeného vzduchu a vákua, Edícia vedeckej a odbornej literatúry, TU v Košiciach, Strojnícka fakulta, 2013. | ||
 In article In article | |||
| [2] | Smrček, J., Palko, A., Tuleja, P.: Robotika - Uchopovacie efektory. 1. vyd. TU, SjF Košice, 2007, 246 s. | ||
| In article | |||
| [3] | Tuleja, P., Šidlovská, Ľ., Hajduk, M.: Effector Mechanism with unilateral gripping. In: TIAM - Technologia i automatyzacja montażu. No. 1 (2013), p. 14-20. | ||
| In article | PubMed | ||
| [4] | Tuleja, P., Šidlovská, Ľ.: Unilateral gripping with active vacuum suction cup: Calculation of gripping force and number of suction cups. In: Transfer inovácií. č. 29 (2014), s. 332-335. | ||
| In article | |||
 CiteULike
CiteULike Delicious
Delicious



{kind=link}
{kind=link}
 gripping of the object){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}